
SprutCAM's Mobile App Quickly Calibrates Robot Movements
Modern Machine Shop
MARCH 29, 2023
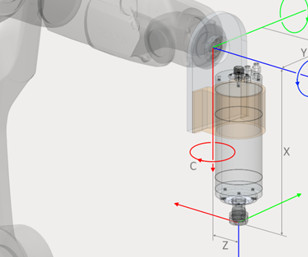
It consists of measuring two points on a probe and calculating the position of the tool center point based on these measurements. The purpose of TCP calibration is to determine the location of the TCP with respect to the robot’s base coordinate system so that it can be accurately positioned for machining or other operations.





Let's personalize your content